Smart 90 Degree steering System IOT
- Availibility: In Stock
Components Required:
- Steering Actuators (High-torque servo motors or electric actuators for steering control)
- Microcontroller (e.g., Arduino, Raspberry Pi, or any suitable microcontroller)
- Sensors:
- Angle Sensors (To measure the rotation angle of the wheels)
- Proximity Sensors (To detect obstacles and ensure safe turns)
- Motor Drivers (For controlling the actuators)
- Control Interface (Joystick or a steering wheel equipped with sensors)
- Power Supply (Battery or vehicle’s electrical system)
- Wheels and Axle Assembly (Capable of rotating up to 90 degrees)
- Chassis (Vehicle frame or model for demonstration)
- Display Unit (Optional: LCD or LED display to show the steering angle and other parameters)
- Connectivity Modules (Bluetooth or Wi-Fi for remote control, if applicable)
- Emergency Stop Mechanism (Safety switch for manual override)
- Connecting Cables and Wires
- Control Software (For real-time control and feedback)
Qty
Your Transaction is Secure
We work hard to Protect your Security and Privacy. Our Payment Security System Encrypts your information during transmission.
Share this Link

Description
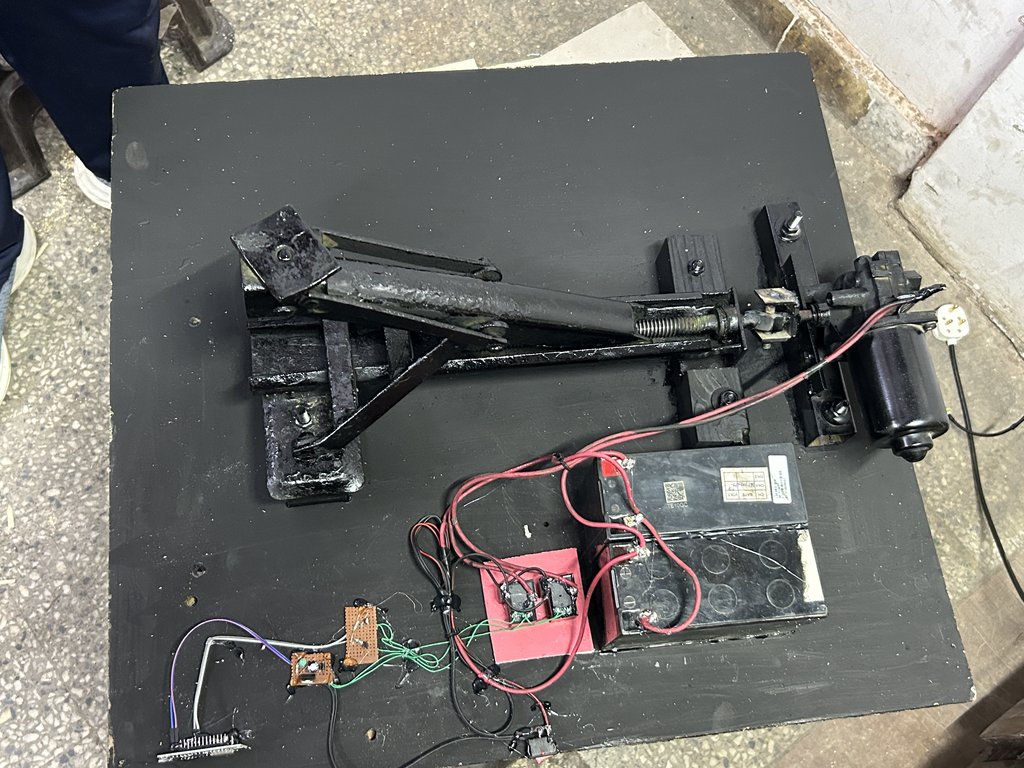
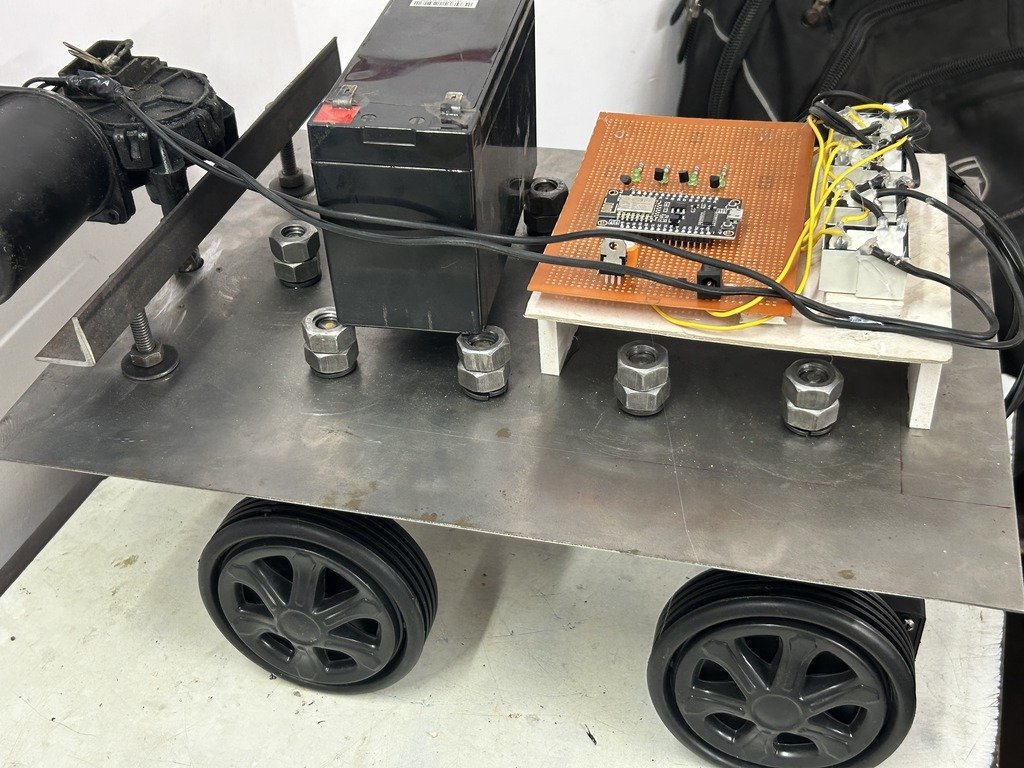
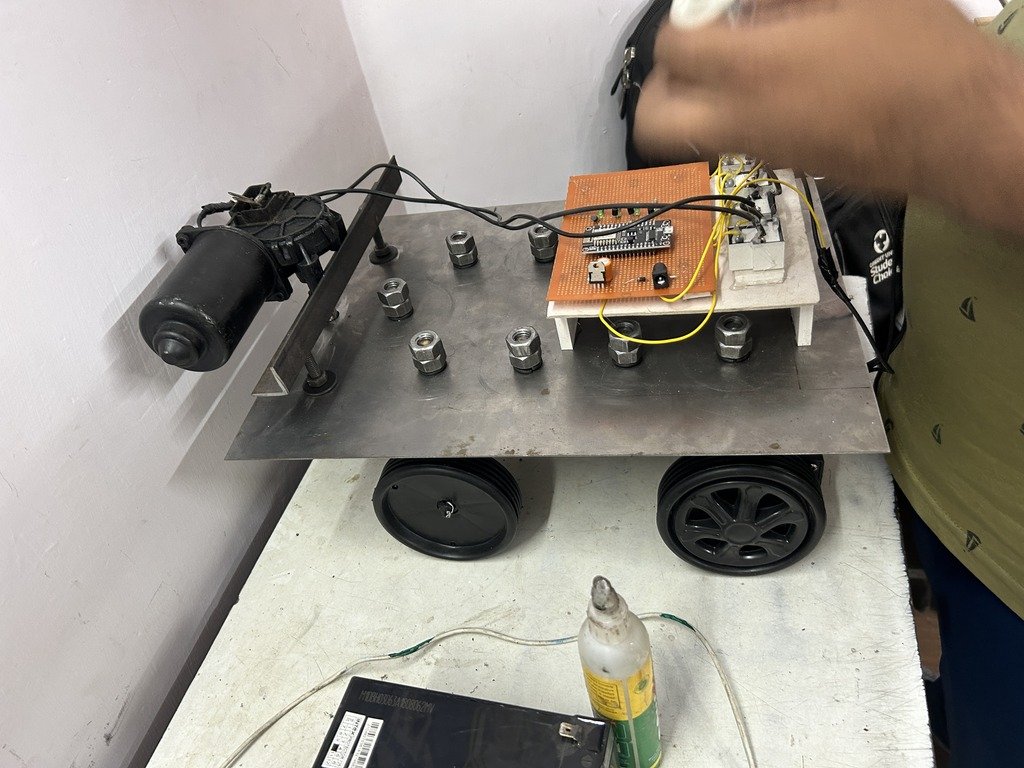
Project Description: The Smart 90-Degree Steering System project involves creating a steering mechanism that allows vehicles to turn their wheels perpendicular to the chassis, enabling lateral movement. This system is particularly useful in tight parking spaces and urban environments where traditional steering systems are limited. The project integrates mechanical, electronic, and control system components to achieve precise steering control.
-
Design and Assembly:
- Chassis and Wheel Setup: Modify or design a chassis that can support 90-degree wheel rotation. The wheels should be mounted on axles capable of rotating as controlled by the steering actuators.
- Actuator Installation: Attach high-torque actuators to the wheels to control their rotation. Ensure that the actuators can handle the torque required for the 90-degree turn.
-
Control System Integration:
- Microcontroller Programming: Develop the control algorithm for the microcontroller to process inputs from the control interface and sensors. The microcontroller should be able to calculate the required actuator movements to achieve the desired wheel angle.
- Sensor Feedback: Integrate angle sensors to provide real-time feedback on the wheel position and proximity sensors for obstacle detection.
-
User Interface:
- Control Interface: Implement a joystick or steering wheel interface that allows the user to control the wheel angle intuitively. This interface should be connected to the microcontroller to provide real-time input.
- Display Unit: (Optional) Add a display to show the current steering angle and any relevant information.
-
Safety and Testing:
- Emergency Stop Mechanism: Include a safety switch that allows manual override of the system.
- Testing and Calibration: Test the system in various conditions to ensure precise control and safe operation. Calibrate the sensors and actuators for accurate feedback and control.
Additional information
Reviews
Add a Review
Your email address will not be published. Required fields are marked *